The Art Language
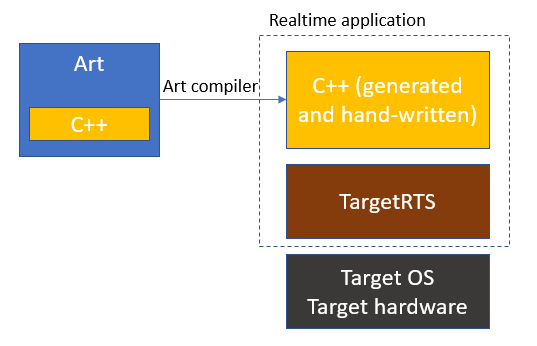
Art is a language for developing stateful and event-driven realtime applications. Stateful means that object behavior can be described by state machines, and event-driven means that objects communicate by sending events that cause state transitions in their state machines.
The Art language provides high-level concepts not directly found in the C++ language. All these high-level concepts are transformed into C++ code by the Art compiler. Generated code uses a run-time library known as the TargetRTS (Target RunTime System). The TargetRTS is a C++ library that acts as a layer between the generated code and the underlying platform (hardware, operating system etc) on which the realtime application runs.
Art is well suited for describing both the behavior and structure of a realtime application, but it uses C++ as expression and action language. C++ is also used for declaring types, variables, functions etc. As a rule of thumb, Art uses C++ for everything where C++ is a good fit, and only provides new language concepts where no appropriate constructs exist in C++. This means that if you already know C++, you can quickly learn Art too, and existing C++ code you have already written can be used in your Art application.
Note that the translation of Art to C++ also involves analysis of the C++ code that is present in the Art files, or in separate C++ source files next to the Art files. The code generator supports certain C++ extensions and will "expand" them to additional C++ code.
Concepts and Terminology
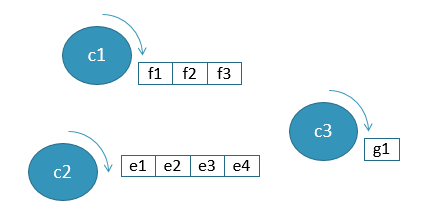
In Art the concept of a capsule is central. A capsule is like a C++ class, but with a few differences and extensions. A C++ class is passive: a caller can access its public members at any time, and the object executes in the caller's context, blocking the caller until the function returns. A capsule, however, is active and has its own execution context. This means that we never call a capsule member function or access a capsule member variable from outside the capsule itself. Instead we communicate with the capsule by sending events to it. Each capsule instance has a queue of events it has received and those events will be dispatched to the capsule instance one by one. The sender of the event is not blocked, as the event is handled by the capsule instance asynchronously when it is dispatched.
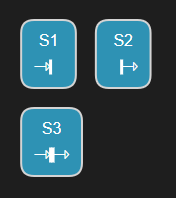
The picture below shows 3 capsule instances each holding a queue with events that have been received, but not yet dispatched. Note that this picture is conceptual. In a real implementation several performance optimizations are applied, for example it's common to let a single thread drive more than one capsule instance, and several capsule instances can share a common event queue. But from a conceptual point of view each capsule instance has its own queue of events that are waiting to be dispatched to it. Events have a priority which determines how they are ordered in the queue. Events with high priority are placed before events with lower priority, and if two events have the same priority they are ordered according to when they arrive.
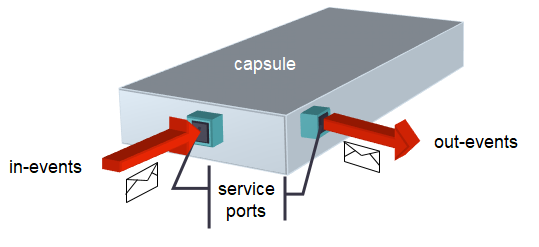
A capsule may have ports. A port is typed by a protocol which defines the events that may be sent in to the port (these are known as in-events), as well as the events the capsule itself may send out through the port for others to receive (these are called out-events). Ports can be used both for internal and external communication. A port used for external communication is called a service port. Together, the service ports constitute the communication interface of the capsule, and decide what "services" the capsule provides for other capsules to use.
A simple capsule which only handles a small number of events, may be able to handle all these events using a single state machine. However, when new ports are added (or new events in protocols typing existing ports), the capsule interface grows and the state machine has to grow with it, since there will be more events for it to handle. Eventually a point is reached where it will not be practical for a capsule to handle any more events in its own state machine, because it has grown too large or complex. If not before, this is the time to define a composite structure for the capsule.
A composite structure is created by decomposing a capsule using capsule parts. A capsule part (or, for simplicity, just part) is typed by another capsule and is a way for a capsule to delegate some of its responsibilities to other capsules. Such a decomposition is purely an implementation detail that is not visible from the outside of the capsule. When you send an event to a capsule you cannot know if the capsule will handle the event itself, or if it will forward the event to another capsule typing one of its capsule parts. The ability to decompose a capsule into parts is important for managing complexity. When a capsule has grown too big and complex you can decompose it into capsule parts without changing the communication interface of the capsule.
Ports of capsules typing capsule parts are connected to each other by means of connectors. A connector is a conceptual construct for showing how events are routed in the composite structure of a capsule. At run-time connectors don't exist, and ports are directly connected to each other. Because of this, it's not mandatory to use connectors. You can also choose to dynamically connect (and disconnect) ports at run-time. Although this provides for more flexibility, it has the drawback of making it impossible to statically visualize the communication paths of a capsule. Ports that connect statically to other ports via connectors are called wired ports. Ports that are connected dynamically without use of static connectors are called unwired ports.
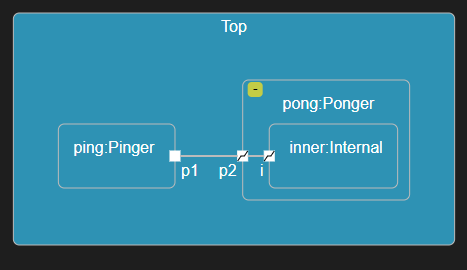
The picture below shows the structure of a capsule Top which consists of two capsule parts ping and pong each holding a capsule instance (a Pinger capsule and a Ponger capsule respectively). The connector between the wired ports p on these capsules makes it possible for these capsules to communicate with each other. Communication can also happen using the unwired ports q1 and q2 if they are connected at run-time. The picture also shows that the capsule Ponger is further decomposed using a capsule part inner. All events sent to port p of Ponger will be further routed to port i of the Internal capsule.
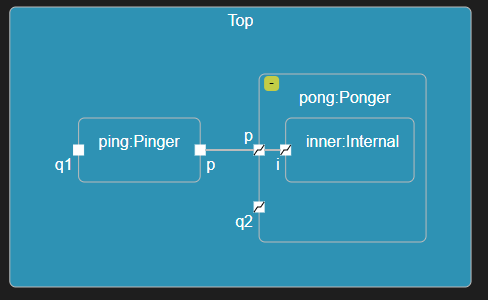
Regardless if ports are statically connected by connectors (wired ports), or dynamically connected at run-time (unwired ports), they must be compatible with each other. This means that the out-events of one port must match the in-events of the other port, for the ports to be possible to connect. This constraint ensures that events are never lost when traveling between two connected ports. To allow two connected ports to be defined using a single protocol, one of the ports can be declared conjugated. For a conjugated port the meaning of in-events and out-events are swapped, so that the in-events are the events that may be sent out through the port, and the out-events are the ports that may be sent to the port. A conjugated port is denoted with a ~ character. In the picture above port q1 is non-conjugated ( ) while port
) while port q2 is conjugated ( ).
).
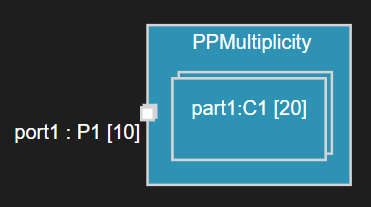
Both capsule parts and ports may have multiplicity. You can think about a capsule part with multiplicity > 1 as an array that holds capsule instances at run-time. In the same way you can think about a port with multiplicity > 1 as an array that holds connections to port instances at run-time. The multiplicity of ports and parts must match when connecting two ports with each other. Once again, this constraint ensures that events will not be lost when traveling between the connected ports at run-time. The picture below shows a capsule with a part and a port that both have multiplicity > 1. In structure diagrams such parts and ports are shown as "stacked boxes".
In addition to regular C++ member functions a capsule may have a state machine as its behavior. A state machine describes how an instance of the capsule may move between different states through its lifetime. A transition that connects a source state with a target state may be triggered when a received event from a capsule's event queue is dispatched. Several conditions must hold true for the transition to trigger. For example, the event must match a trigger that specifies the expected type of event and the port on which it was received. It's also possible to associate a boolean guard condition with the transition and/or with the trigger which must be true for the transition to trigger. A transition may have an effect, which is a piece of C++ code that executes when the transition gets triggered.
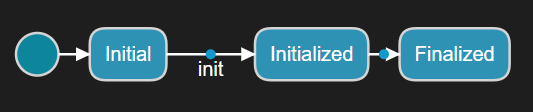
The picture below shows a state machine containing a few states and transitions. The presence of transition guard code is shown with a yellow dot and the presence of transition effect code is shown with a blue dot. Both these are C++ code snippets that are embedded in the Art file.
When a capsule instance is created (this is sometimes referred to as capsule incarnation), it's state machine starts to execute by triggering the transition that goes out from the initial state (the circular blue symbol to the left in the above diagram). Each state machine must have exactly one such initial state with an outgoing transition. Since this initial transition is triggered automatically when the capsule instance is created it cannot have constraints such as triggers and guard conditions. The initial transition is an example of a non-triggered transition since it cannot have triggers.
The path from the source state to the target state can sometimes consist of more than one transition. In that case only the first of these is a triggered transition that may have triggers that specify when it will trigger. Once the first transition in this path has triggered, subsequent non-triggered transitions will always execute, one by one according to how they are connected in the state machine. However, also non-triggered transitions (with the exception of the initial transition) may have guards. These guards are evaluated before the triggered transition executes, which guarantees that the full transition path to the target state can be completed. There is one exception to this rule, for transitions that leave a choice. Such guards are only evaluated once the choice has been reached to dynamically decide which outgoing transition to take next. This also means that guards of such transitions must be written so that exactly one outgoing transition is enabled, or there is a risk that the state machine will get stuck in the choice.
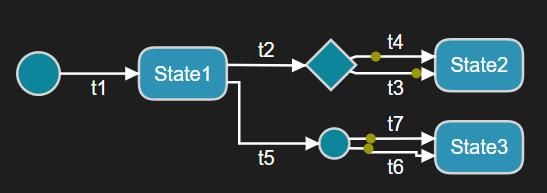
In the state machine shown below the transitions t2 and t5 are triggered transitions, while other transitions are non-triggered. Transition t5 can only be triggered if either the guard of t7 or t6 is true, while t2 can be triggered even if neither the guard of t3 nor t4 is true. The target of transition t5 is a junction which is used for either splitting or merging transition paths depending on evaluated guard conditions.
A state may be decomposed by a sub state machine. Such a state is called a composite state and a state machine that has composite states is called a hierarchical state machine. Transitions enter a composite state through an entry point and exit it through an exit point.
Usually an entry point is connected to a nested state inside the state machine of the composite state, but it can also connect to a deep history. Reaching the deep history of a composite state means that all sub states that were previously active will become active again. Hence, deep history is a way to restore a composite state so all its nested states will be reactivated again recursively.
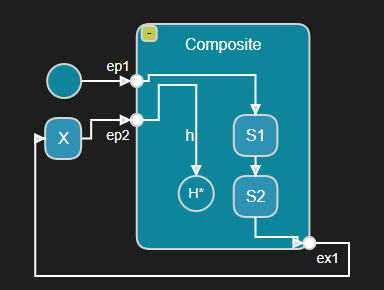
The picture below shows a state machine with a composite state Composite containing two nested states S1 and S2. When this state machine starts to execute state S1 first becomes active since Composite is entered using the ep1 entry point. Later, when leaving S2 through the ex1 exit point, state X becomes active. Then when leaving X through the transition that connects to the ep2 entry point the state S1 once again becomes active since ep2 is connected to the deep history. Of course, whenever a nested state is active, the enclosing composite state is also active. At any point in time a state machine has an active state configuration, which consists of the set of currently active states.
A state may have an entry action and/or exit action which is a C++ code snippet that gets executed whenever the state is entered or exited. Note that state entry actions for nested states also run when those states are entered because of a deep history. In state diagrams the presence of entry and/or exit actions are shown by icons just below the state name. In the state machine shown below state S1 has an entry action, state S2 has an exit action and state S3 has both an entry and an exit action.
A transition where the source and target state is the same state is called a self-transition. A special kind of self-transition is an internal transition, which is a transition that when triggered doesn't leave the current state. Hence, when an internal transition is triggered the active state configuration remains unchanged, and neither the entry nor exit action of the state gets executed. In the state machine shown below the state has two self-transitions; t which is a regular self-transition (a.k.a. external self-transition) and it which is an internal transition. Since a state may have a large number of internal transitions they are not shown inside the state symbol, but if you select the state symbol you can see them in the Properties view. An icon is shown in the upper right corner of states that contain internal transitions.
![]()
State machines can not only be defined for capsules but also for regular classes. This can be useful if you want a plain passive C++ class to have a state machine. Contrary to a capsule a class may not have ports and doesn't execute in its own context. It's therefore common to associate such a class with a capsule that it can use for sending events through its ports. Transitions of a passive class state machine are triggered by calling trigger operations on the class. Such operations have no code, but just trigger transitions in the class state machine.
The realtime application needs to designate one capsule as the top capsule. This is done in the transformation configuration, which is a file containing all the properties used for building the application (e.g. code generator options, compiler settings etc.). There is no language construct in Art for defining a top capsule; any capsule that you define can act as the top capsule. However, in practise you typically decide at an early stage which capsule that will be the top capsule.
The top capsule is the entry point of the realtime application. When it starts to execute one instance of the top capsule will be automatically created, and its state machine starts to execute. If you build a library rather than an executable you don't have a top capsule.
Embedded C++ Code
Art uses C++ as action and expression language. It also uses C++ for defining types, variables and functions. A C++ code snippet can be embedded into an Art file at many places by enclosing it with backticks. Here is an example of how to write the code that should execute when a transition triggers:
S1 -> S2 on timer.timeout
`
std::cout << "Hello World!" << std::endl;
`;
Here is another example that shows how to include some C++ code as the implementation preface of a capsule:
capsule BrewControl {
[[rt::impl_preface]]
`
#include <iostream>
`
};
If the code snippet needs to contain the backtick character, for example in a comment or a string literal, you need to escape it by preceeding it with a backslash (\). For example:
capsule StringProcessor {
[[rt::decl]]
`
// A member variable with default value \`
char escapeChar = '\`';
`
statemachine {
state State;
initial -> State;
};
};
File-level Code Snippets
Code snippets can not only be associated with Art language constructs as in the above examples, but can also be placed at the Art file level. There are two such file-level code snippets:
- Declarations (rt::decl)
May contain arbitrary C++ declarations. All these code snippets will be generated into a C++ header file with the same name as the Art file.
- Implementations (rt::impl)
May contain arbitrary C++ implementations. All these code snippets will be generated into a C++ implementation file with the same name as the Art file.
As an example, assume we have an Art file sample.art with the following contents
[[rt::decl]]
`
typedef C* Cptr;
Cptr func1();
`
[[rt::impl]]
`
Cptr func1() {
return nullptr;
}
`
Two C++ files will be generated from this Art file:
sample.art.h
typedef C* Cptr;
Cptr func1();
sample.art.cpp
#include "sample.art.h"
Cptr func1() {
return nullptr;
}
File-level code snippets are useful whenever you need to include some C++ code in your application that doesn't naturally belong to any particular Art element. They can for example be used for declaring and implementing utility functions or types that are needed by many different Art elements. To use the declared elements from an Art element, you need to add an #include for the generated header file using a code snippet on the Art element. Note that an #include is needed even if the Art element is located in the same Art file as the declared elements it wants to use.
Below is an example that shows how a protocol and a capsule can use the type Cptr defined in sample.art by adding #includes:
protocol MyEvents {
[[rt::header_preface]]
`
#include "sample.art.h"
`
out alert(`Cptr`);
};
capsule Cx {
[[rt::header_preface]]
`
#include "sample.art.h"
`
[[rt::decl]]
`
protected:
Cptr m_ptr;
`
// ...
};
Here an rt::header_preface code snippet is used for making the generated capsule and protocol header files include sample.art.h while an rt::decl code snippet is used for declaring a member variable m_ptr for the capsule. See the documentation of the different Art elements below to learn about what code snippets that are available for each kind of Art element.
Hint
As an alternative to placing common C++ code in an Art file you can also use regular C++ files and then include these into the build. See Non-Generated C++ Files for more information.
Art Files and Folders
Any but the simplest of applications will consist of multiple Art files organized into folders. You can create as many Art files as you like, and every Art file may contain one or several Art elements. Art files containing Art elements that are related to each other should be grouped in a folder. For example, if you build a library from certain Art elements it makes sense to put the Art files with those elements in their own folder.
Folders with Art files should be added as workspace folders, either using the command File - Add Folder to Workspace (to add a folder to an existing workspace), or using the command File - Open Workspace from File (to open an existing workspace from a file that defines the workspace folders). If your application consists of more than a couple of workspace folders use of a workspace file is recommended as it makes it quick and easy to add all workspace folders in one go with a single command.
You may use subfolders within a workspace folder to further group Art files. This grouping has no semantic significance, but can help in case a workspace folder has a large number of Art files (or C++ files).
Note
If your workspace folder has subfolders make sure that Art files that contain file-level code snippets have unique names. If they don't, the .art.h and .art.cpp files that are generated from those Art files will overwrite each other since the file names will clash.
Multi-Root Workspaces
A workspace in Visual Studio Code and similar IDEs is either a single folder or a collection of workspace folders (a.k.a. a multi-root workspace). If you use the command File - Open Folder you get a workspace that consists of that single opened folder. Even if there are a few simple cases when that is all you need, it's always recommended to use Code RealTime with multi-root workspaces. In fact, as soon as you generate code for a TC it will be placed in its own workspace folder. In almost all cases a Code RealTime workspace will therefore contain at least two workspace folders.
Beware that when Visual Studio Code goes from a workspace that consists of a single folder to become a multi-root workspace, it automatically restarts all extensions, including Code RealTime. For example, this happens if you build a TC of a single workspace folder, when the target workspace folder with the generated code gets added to the workspace. If you are not aware of this, and are working with something else when this restart happens, this can come as a surprise and interrupt your work. It's therefore strongly recommended to always use multi-root workspaces with Code RealTime. If you started by opening a single folder as your workspace, make sure to save it as a workspace file using the command File - Save Workspace As before you build or set a TC as active. There are also other benefits with always using multi-root workspaces. For example, all workspace-level settings you make when working in that workspace will be persisted into the same .code-workspace file.
Binding of References across Art Files
When an Art file contains a reference to an Art element that cannot be found within the same file, other Art files in the workspace will be searched for an Art element with the referenced name. This search starts with the Art files in the same workspace folder (and its subfolders). If a matching Art element is found in one of these files, the reference is bound to it. Otherwise an active transformation configuration (TC) is required, which specifies one or several prerequisites. The Art files in the workspace folders where the prerequisite TCs are located will then be searched (including subfolders of those workspace folders). The search continues recursively if the prerequisite TC itself has prerequisites.
If a matching Art element cannot be found in any of these locations the reference will be unresolved and an error will be reported. For example:
Couldn't resolve reference to Protocol 'UnknownPort'. (ART_9001_unresolvedReference)
For more information about unresolved references, see this validation rule.
If more than one Art element with the referenced name are found, an error will be reported on the active TC. See the validation rule TC_7019.
Textual and Graphical Notations
The Art language is a textual language, but many parts of it also have a graphical notation. For example, a state machine can be shown using a graphical state diagram, and the composite structure of a capsule can be shown in a structure diagram. Relationships between capsules, protocols and classes, such as inheritance, can be shown in class diagrams.
Below are examples of these three kinds of diagrams:
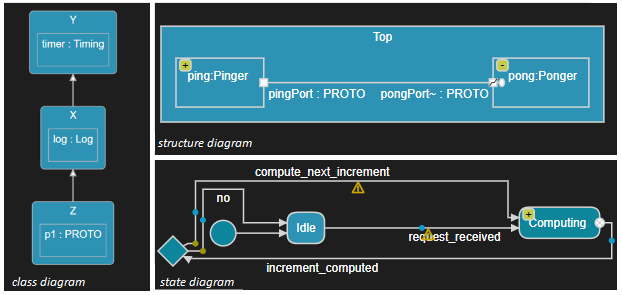
Diagrams are automatically updated when the corresponding Art file is modified. By default diagrams are rendered using automatic layout to avoid the need for manual tidy-up of diagrams when something changes. However, it's also possible to use manual diagram layout. See Automatic vs Manual Layout for more information.
To avoid cluttering an Art file with too much non-semantic information, most properties related to diagrams are stored in separate JSON files. The main exception is the color property which allows to specify a custom color for Art elements, which will be used when showing the element in a diagram. For example, to colorize a state specify a custom color for it like this:
capsule Cap {
statemachine {
state ColorfulState[[rt::properties(color="#b40e0e")]];
};
};
Art elements are mostly edited using their textual notation, but diagrams also provide some editing capabilities. However, all edit commands performed from a diagram are actually mapped to corresponding textual modifications of the Art file. Editing from a diagram is therefore simply an alternative, and sometimes more convenient way, of editing the textual Art file.
Syntax
Art uses a syntax that should be familiar to developers with knowledge about languages like C++ and Java.
- Declarations are terminated with a semicolon
; - When multiple elements are declared in the same language construct commas
,are used for separating the elements - Curly brackets
{}are used for grouping nested elements - Square brackets
[]are used for specifying cardinality (i.e. multiplicity) of elements - A dot (
.) is used as scope resolution operator - Line
//and block/* */comments may be freely used for commenting
Names and Keywords
Names of Art elements must be valid C++ identifiers since they will be used as names of C++ definitions in generated code. Names also must not clash with names used in the TargetRTS. Don't worry - the Art language editor will let you know if you choose a name that won't work.
Just like any language, Art has certain keywords that are reserved and which cannot be used as names. These keywords are listed below:
| Art keywords | |||||
|---|---|---|---|---|---|
| abstract | behavior | capsule | choice | class | connect |
| entry | entrypoint | exclude | exit | exitpoint | fixed |
| history | in | initial | junction | notify | on |
| optional | out | part | plugin | port | protocol |
| publish | redefine | service | state | statemachine | subscribe |
| template | trigger | typename | unwired | when | with |
Art is a case-sensitive language and names may use any capitalization. However, just like with most languages, there are conventions for how to capitalize names. Those conventions are described below where each Art language construct is described in detail.
Comments
The same kinds of comments as in C++ can be used, i.e. line and block comments.
// line comment
/* block comment */
/* multi-line
block comment */
Capsule
A capsule defines an active class with its own execution context. It may have ports through which it can receive events. A capsule has a state machine that describes how instances of the capsule transitions between different states in the response to received events.
Names of capsules are typically nouns, often describing something that performs some form of activity. For example "Controller", "TrafficLight" or "FaultHandler". By convention names of capsules start with uppercase.
Embedded C++ code can be used for declaring member variables, member functions, nested types etc for the capsule.
Here is an example of a capsule with a simple state machine and a member variable.
capsule Elevator {
[[rt::decl]]
`
unsigned int currentLevel = 0;
`
statemachine {
state Waiting;
initial -> Waiting;
};
};
Note
Capsule member variables and member functions may be private or protected, but should usually not be public. To avoid threading issues all communication with a capsule should be done using events, and therefore public members are not recommended. An exception is capsule constructors which need to be accessible from other capsules that create instances of the capsule using a capsule factory. If you anyway let a capsule have public members you need to ensure they are only accessed from the same thread that runs the capsule.
The example above uses an rt::decl code snippet for declaring a capsule member variable. It will have the default visibility which is private. Here is the list of all code snippets that can be used for a capsule:
| Code snippet | C++ mapping | Example of use |
|---|---|---|
| rt::header_preface | Inserted at the top of the capsule class header file | Adding #includes needed by the capsule declaration |
| rt::header_ending | Inserted at the bottom of the capsule class header file | Declaring a type alias for the capsule class |
| rt::impl_preface | Inserted at the top of the capsule class implementation file | Adding #includes needed by the capsule implementation |
| rt::impl_ending | Inserted at the bottom of the capsule class implementation file | Undefining a macro only used in a capsule implementation |
| rt::decl | Inserted into the capsule class header file (inside the class) | Declaring a capsule member variable or function |
| rt::impl | Inserted into the capsule class implementation file | Implementing a capsule member function |
Capsule Constructor
Just like a regular class a capsule may have constructors. A capsule constructor is declared using an rt::decl code snippet and defined using an rt::impl code snippet. All capsule constructors have two mandatory parameters:
- rtg_rts This is the controller (
RTController*) which will execute an instance of the capsule. It corresponds to the thread that runs the capsule instance. - rtg_ref This is the part (
RTActorRef*) into which the capsule instance will be inserted. Every capsule instance, except the top capsule, resides in exactly one part.
After these parameters you can add your own parameters, to pass arbitrary initialization data to the capsule instance. Below is an example where a capsule MyCap has a reference variable m_c. To initialize this variable a capsule constructor is used.
capsule MyCap {
[[rt::decl]]
`
public:
MyCap(RTController*, RTActorRef*, MyClass&);
private:
MyClass& m_c;
`
[[rt::impl]]
`
MyCap::MyCap(RTController* rtg_rts, RTActorRef* rtg_ref, MyClass& c)
:RTActor(rtg_rts, rtg_ref), m_c(c) { }
`
};
If you don't define any constructor for your capsule, a default capsule constructor will be generated automatically. It only has the two mandatory constructor parameters, and passes them to the TargetRTS which will create the capsule instance. But if your capsule has at least one user-defined constructor, a default capsule constructor will not be generated, and you then need to make sure to provide arguments that match the constructor parameters, when an instance of the capsule should be created. For this you need to use a capsule factory. You can either specify such a capsule factory statically on a part that is typed by the capsule (see Part with Capsule Factory), or you can provide a capsule factory dynamically when calling incarnateCustom() on a Frame port to incarnate an optional capsule part. Here is C++ code for doing the latter (assuming the optional part is called thePart):
RTActorId id = frame.incarnateCustom(thePart,
RTActorFactory([this](RTController * c, RTActorRef * a, int index) {
return new MyCap(c, a, getMyClass()); // Use capsule constructor
}));
if (!id.isValid()) {
// Failed to incarnate thePart
}
Note the following:
- A capsule constructor must call the
RTActorconstructor in its initializer. - Code that calls the capsule constructor must include the header file where the capsule is located.
Example
You can find a sample application that uses a capsule constructor here.
Read more about capsule factories here.
Capsule Destructor
The destructor of a capsule frees the memory used for representing its states, ports etc. You can provide your own destructor if you want to perform additional clean-up activites when a capsule instance is destroyed (for example, freeing resources allocated in the capsule constructor).
capsule CapsuleWithDestructor {
[[rt::decl]]
`
public:
virtual ~CapsuleWithDestructor();
`
[[rt::impl]]
`
CapsuleWithDestructor::~CapsuleWithDestructor() {
// Clean-up code here
}
`
};
Example
You can find a sample application with a capsule that implements its own destructor here.
Clean-up code can also be placed in a function _predestroy() which overrides RTActor::_predestroy(). This function gets called just before the capsule instance is destroyed and may often be a better place where to write clean-up code. If you are using a custom capsule factory which doesn't destroy capsule instances by means of the standard delete operator, then the capsule destructor will not be called, and you can instead use _predestroy() which always is called when a capsule instance is about to be destroyed.
Here is an example of how to use _predestroy():
capsule C {
[[rt::decl]]
`
public:
virtual void _predestroy() override {
// Clean-up and free allocated resources here
SUPER::_predestroy();
}
`
// ...
};
It's important to remember to invoke the inherited function by calling SUPER::_predestroy().
Example
You can find a sample application with a capsule that overrides _predestroy() here.
Protocol and Event
A protocol defines events that may be sent in to a port (so called in-events) and events that may be sent out from the same port (so called out-events). By grouping events into protocols, and then typing ports with such protocols, we can precisely define which events the capsule may send and receive through that port.
By convention names of protocols start with uppercase, while names of events start with lowercase and use camelCase if the name consists of multiple words.
A protocol event may have a parameter, which enables it to carry data. You declare a parameter for an event by specifying the C++ type of the data to be carried by the event.
Note
An event can have at most one parameter. If you need to send multiple data objects with an event you can declare an event parameter of struct or class type.
The C++ type of an event parameter can be any primitive or user-defined type. Types may be specified with qualified names if necessary (e.g. A::B), but cannot have type modifiers (e.g. Type*) or template parameters (e.g. T<A>). If required you can create a typedef or type alias of the type you want to use, and then use the name of that typedef or type alias as the event parameter type.
If a user-defined type is used, it must usually have a type descriptor so the TargetRTS can copy or move the data at run-time when the event is sent. However, in some special cases a type descriptor is not required, for example if the user-defined type is a typedef or type alias of a primitive type. In those cases you must use the [[rt::no_descriptor]] attribute to specify that you want to pass the event parameter without using a type descriptor. See the validation rule CPP_4000_eventTypeWithoutTypeDescriptor for examples and more information.
The following code snippets can be used for a protocol:
| Code snippet | C++ mapping | Example of use |
|---|---|---|
| rt::header_preface | Inserted at the top of the protocol class header file | Adding #includes of header files defining types used as event parameter types |
| rt::header_ending | Inserted at the end (or near the end) of the protocol class header file | Undefining a local macro that was defined in rt::header_preface |
Here is an example of a protocol that defines some in-events and some out-events:
protocol MachineEvents {
in start();
in startDeferred(`unsigned long` /* milliseconds */);
out success();
out error(`MsgString` /* error message */);
in relayEvent(); out relayEvent(); // symmetric event
};
At run-time we often talk about a message rather than an event. A message is an instance of an event, similar to how a capsule instance is an instance of a capsule. In other words, a message is a run-time concept while an event is a design-time concept.
Symmetric Event
The event relayEvent in the above example is both an in-event and an out-event. Such a symmetric event is useful in protocols typing ports that may receive and send the same events (for example a port that just forwards received events to another port). By convention a symmetric event is declared on a single line.
If a protocol only contains symmetric events, then ports typed by that protocol can be connected regardless of their conjugation.
Port
A port defines a named point of communication for a capsule. A port is typed by a protocol which defines the events that may be sent in to (in-events) and out from (out-events) the port. A port may be conjugated in order to swap the meaning of in-events and out-events. That is, a capsule may send out-events on its non-conjugated ports, but in-events on its conjugated ports. A port becomes conjugated if you add a tilde (~) after its name.
Ports are often named to describe the role or purpose of the communication that takes place on them. By convention names of ports start with lowercase and use camelCase if the name consists of multiple words.
Here is an example of a capsule with a few ports. Note that Code RealTime provides several predefined protocols that can be used right away, for example Timing. Also note that you can declare multiple ports on a single line if the ports are of the same kind (p1 and p2 below are both service ports).
capsule Machine {
service port control : MachineEvents;
behavior port timer : Timing; // predefined Timing protocol
service behavior port control2 : CtrlEvents;
service port p1~ : MoreEvents, p2~ : OtherEvents;
// ...
};
Service ports constitute the externally visible communication interface for a capsule, and together they define which events can be sent to the capsule, and which events the capsule can send out for other capsules to receive. In a structure diagram the service ports are shown on the border of a capsule or part symbol.
A behavior port is logically connected to the behavior (i.e. state machine) of a capsule. This means that an event that a capsule receives on a behavior port will be handled by the state machine of that capsule. A non-behavior port, however, will simply route an event to another port to which it is connected. Every event that is sent will ultimately reach a behavior port (provided ports are properly connected), and the state machine of the capsule owning that behavior port will handle the event. In a structure diagram, behavior ports are connected to a small ellipse which represents the capsule state machine.
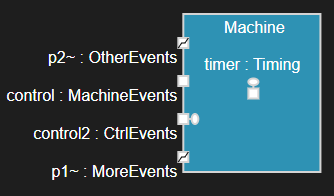
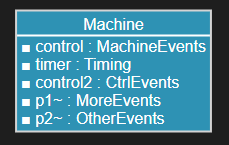
Note that ports can also be shown in a class diagram.
When a capsule wants to send an event to another capsule it calls a function on the port. There is one such function for each out-event (or in-event if the port is conjugated). These functions return an object on which a send() function can be called. Note that the sending capsule doesn't need to know which capsule that will receive and handle the sent event.
Here is C++ code for sending events on ports with and without data:
pongPort.pong().send(); // Send event "pong" without data on the "pongPort"
pingPort.ping(5).send(); // Send event "ping" with data (an integer) on the "pingPort"
Example
You can find a sample application that sends events on ports with and without data here.
Note that send() is not the only function you can call. For example, you can call invoke() if you want to wait until the receiver has received and replied to the event. This is useful for implementing synchronous communication between capsules.
Self Communication
Sometimes a capsule may want to send a message to itself. For example, the need may arise to transition from one state to another when a transition that was triggered by another message is already executing. If that message, for whatever reason, could not directly trigger the transition to the desired target state, the capsule can send a message to itself for triggering it.
Self communication requires two behavior ports on the same capsule that are connected to each other.

A message sent on one of these ports will be received on the other port, on the same capsule.
Example
You can find a sample application that uses self communication here.
There are two other methods of self communication which work in a different way but give a similar result:
- The
sendCopyToMe()TargetRTS function can be used to post a copy of a received message into the receiver's message queue. However, even if it's the receiver who asks for this to happen (typically by callingsendCopyToMe(msg)from a transition effect code snippet), this is really a request for the TargetRTS to re-send a copy of a previously dispatched message again. This means that the sender of the second message will not be the receiver, but the capsule which sent the first message. - It's possible to use a timer port to set a one-shot timer with a relative time of 0. It will timeout quickly, but is usually less efficient than use of two connected behavior ports. It is also a less good approach if data needs to be passed with the message since timers only allow to pass untyped data.
Port Multiplicity
At run-time an instance of a port can be connected to a port instance on another capsule. Such connections is what make a sent event be routed from the port on which it is sent, through a number of non-behavior ports, until it finally reaches a behavior port. By default a port has single multiplicity (1) meaning that at most one such connection can be established. However, you can specify a non-single multiplicity for a port to allow for more connections to be created at run-time.
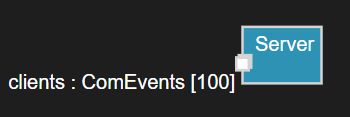
In the example below a Server capsule has a port with multiplicity 100. At run-time an instance of that Server capsule can be connected to 100 different client ports, each of which can send events to the server.
capsule Server {
service port clients : ComEvents[100];
// ...
};
In a structure diagram a port is shown as "stacked" if it has non-single multiplicity.
You can also use a C++ expression to specify the port multiplicity. This can for example be useful if the multiplicity is defined in C++ as a macro or a constexpr. For example:
capsule Server {
service port clients : ComEvents[`NBR_CLIENTS`];
// ...
};
Notifying Port
Every protocol contains two implicit events rtBound and rtUnbound. A port can receive those events whenever a connection for the port is established (rtBound) or dropped (rtUnbound) at run-time. Declare the port as notifying to receive these events.
capsule Server {
service notify port clients : ComEvents[100];
// ...
};
Port notifications are useful in dynamic systems when capsules need to wait until other capsules are ready, before they can start to communicate with those capsules. For example, a client may need to wait until a server is ready before it sends a request to that server. In the same way it's often useful to get notified when a connection is dropped, since that means communication on that port should no longer take place.
Unwired Port
Ports are by default wired, meaning that they should be connected with connectors to specify statically how events will be routed. Having a static connector structure defined has the benefit that it becomes possible to look at a capsule's structure diagram to see how events received by the capsule will be routed at run-time. However, in some dynamic systems it's not possible to describe this statically. Ports may be connected and disconnected dynamically and the run-time connections between port instances may hence vary over time. If you need this flexibility you can declare ports as unwired.
Here is an example of an application where a client capsule can connect to different kinds of server capsules. Sometimes it may be connected to server1 and sometimes to server2. It is therefore not possible to describe the connections of Top statically using connectors, and we can instead declare the ports as unwired.
capsule Top {
part client : Client;
part server1 : Server;
part server2 : Server;
// ...
};
capsule Client {
service behavior unwired port p : Protocol;
// ...
};
capsule Server {
service behavior unwired port p~ : Protocol;
// ...
};
Note
Only use unwired ports when required. It's strongly recommended to use wired ports whenever possible to enable the visualization of the connector structure in a structure diagram. When unwired ports are required you should write a comment that describes how they will be connected at run-time, since this often cannot easily be concluded by looking at the C++ code of the capsule.
An unwired port is always a behavior port. In a structure diagram an unwired port is drawn with a hollow ellipse, while a wired behavior port is drawn with a filled ellipse. In the structure diagram below port q is wired while port p is unwired.

An unwired port is either a service access point (SAP) or a service provision point (SPP) depending on the role it plays in a dynamic connection with another unwired port. The capsule that owns the SAP port uses it to subscribe to a service that is published by another capsule by means of an SPP port. The capsule with the SAP port is often called "client" or "subscriber" while the capsule with the SPP port is often called "server" or "publisher".
Unwired ports get connected by means of registering them under a service name that should be unique in the application. Registration of unwired ports can either happen automatically when the container capsule instance is created, or programmatically at a later point in time. It's also possible to deregister unwired ports in order to disconnect them. You can specify how an unwired port should be registered by means of the following properties:
- registration specifies when an unwired port should be registered
- registration_name specifies the service name with which the port should be registered
If you choose to register an unwired port programmatically (using the TargetRTS functions registerSPP() and registerSAP()) you decide at registration time whether the port should be an SAP or SPP port. However, if you choose to instead let the port be registered automatically you need to declare the port as either a subscribe (SAP) or publish (SPP) port. Here is the same example again, but now with automatic registration of the unwired ports using the service name myService:
capsule Client {
subscribe behavior port sap [[rt::properties(
registration_name = "myService")
]] : Protocol;
// ...
};
capsule Server {
publish behavior port spp~ [[rt::properties(
registration_name = "myService")
]] : Protocol;
// ...
};
Note that the keyword unwired can be implicit when you declare a port as either a subscribe or publish port.
Hint
The TargetRTS provides a configuration setting PORTFULL_WARNING which you can enable to get runtime warnings if you attempt to connect unwired ports in ways that violate the multiplicites of the ports. For example, you can use this for detecting if an SPP port doesn't have a high enough multiplicity for all registerred SAP ports to connect to it.
Connector
Connectors describe how events are routed within a capsule by connecting ports in its composite structure. They make it possible to see in a structure diagram which parts of a capsule that can communicate with each other. Each connector connects exactly two ports with each other. A connected port may either be a port of the capsule itself, or a port of a capsule that types one of its capsule parts. A few constraints decide if it's possible to connect two ports:
1) The ports must be wired. Unwired ports cannot be connected.
2) The ports must be typed by the same protocol.
3) The ports' conjugations must match. If the ports are at the same level in the capsule's structure (e.g. both ports belong to capsules typing capsule parts owned by the same capsule), then the connected ports must have the opposite conjugation. This is because events that are sent out from one of the ports must be able to be received by the other port and vice versa. However, if the ports are at different levels in the capsule's structure (e.g. one of them belongs to a capsule typing a capsule part owned by the capsule and the other belongs to the capsule itself), then the ports must have the same conjugation. This is because in this case events are simply delegated from one capsule to another.
4) If a connector is connected to a port and a part (where the port is defined on the capsule that types the part), then the port must be a service port. Only service ports are visible from the outside of a capsule.
The example below shows the structure diagram of a capsule Top where we can see two connectors.
capsule Top {
part ping : Pinger, pong : Ponger;
connect ping.p1 with pong.p2;
// ...
};
capsule Internal {
service behavior port i~ : PROTO;
// ...
};
capsule Pinger {
service behavior port p1 : PROTO;
// ...
};
capsule Ponger {
service behavior port p2~ : PROTO;
part inner : Internal;
connect p2 with inner.i;
// ...
};
The connector between p1 and p2 goes between two ports on the same level which is why these ports must have opposite conjugation. The connector between p2 and i goes between two ports at different levels which is why these ports must have the same conjugation. The non-behavior port p2 is a so called relay port (it just relays all events it receives to another port) and the connector between p2 and i is sometimes called a delegation connector to describe the fact that capsule Ponger uses it for delegating some of its responsiblities to the capsule Internal. Note that relay ports can be optimized away so they don't exist at run-time (i.e. at run-time port p1 can be directly connected to i).
A connector doesn't have a direction, so it doesn't matter in which order it connects the two ports. That is, connecting X with Y is equivalent to connecting Y with X.
Local Binding
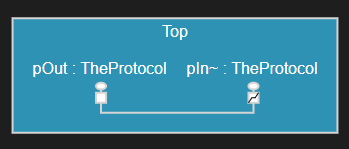
A connector can connect two behavior ports on the same capsule (with opposite conjugations). At run-time this will lead to a local binding between these ports. This enables the capsule to send events to itself which sometimes can be useful. Here is an example:
capsule Top {
behavior port pOut : TheProtocol;
behavior port pIn~ : TheProtocol;
connect pOut with pIn;
// ...
};
One reason for a capsule to send events to itself could be to split a big and long-running task into smaller tasks. By sending an event to itself after completion of each small task, the capsule can remain responsive to other events that may arrive in the meantime. When it receives the event it sent it can proceed with the next part of the big task.
Example
You can find a sample application that uses a local binding here.
Part
A capsule can be decomposed by means of parts (also called "capsule parts" to emphasize that they are parts of a capsule). A part is a container that at run-time may hold one or many capsule instances. The part has a multiplicity that specifies the maximum number of capsule instances it can contain at run-time, and it has a type which is another capsule. All capsule instances must either be of that specific capsule type, or of a capsule type that inherits from it.
It's common to name parts according to the capsule that types them. For example, a part typed by a capsule Controller may be called controller, ctrl or perhaps theController. By convention part names start with lowercase and use camelCase if the name consists of multiple words.
There are three kinds of parts which determine how and when they will be populated with capsule instances.
1) Fixed part
In a fixed part capsule instances are created automatically when the container capsule is created, and destroyed when the container is destroyed. Fixed parts by default have multiplicity 1. Such a part will always contain one and only one instance of the capsule that types the part.
Example
You can find a sample application that has a fixed part with a multiplicity here.
2) Optional part
In an optional part capsule instances don't have a strong lifetime relationship with the container capsule as is the case for fixed parts. The capsule instances can be created programmatically using a Frame port at some point after the container capsule has been created, and they can be destroyed before the container capsule is destroyed. However, at the latest they will be automatically destroyed when the container is destroyed. Optional parts by default have multiplicity 0..1. This means that they may either contain zero or one capsule instance at any point in time. The presence of zero in the multiplicity is what makes the part optional. Here is C++ code for creating a capsule instance in an optional part (also known as incarnating the part) and then immediately destroying it:
RTActorId id = frame.incarnate(thePart);
if (!id.isValid()) {
// Failed to incarnate thePart
}
frame.destroy(id);
It's important to check that incarnation was successful since there are many reasons why it can fail (e.g. too low multiplicity to fit the created capsule instance, not enough memory etc).
If the instantiated capsule has a constructor you need to use a capsule factory for providing the constructor arguments (either provided when doing the incarnation as shown here or specified on the part as described here).
Example
You can find a sample application that creates and destroys capsule instances in optional parts here.
3) Plugin part
A plugin part is similar to an optional part in that it is populated by capsule instances programmatically. However, the capsule instances are not created in the plugin part but instead imported into the plugin part from another part. Typically such a capsule instance is first created into an optional part, and then at some later point in time imported into a plugin part. Later it can be deported (i.e. removed) from the plugin part and perhaps imported into another plugin part. This makes it possible to create very dynamic composite structures where the same capsule instance can play different roles in different parts over time. Moving a capsule instance by deporting it from one plugin part and then importing it in another plugin part is usually more efficient than destroying the capsule instance in one optional part and then creating another capsule instance in another optional part (and data stored in the moved capsule instance is of course retained). Note that the parts which you move a capsule instance between can belong to different composite structures.
Plugin parts can be useful in applications when a capsule needs to use a shared resource for some time, and then return it so it can be used by other capsules. The shared resource is the capsule that is imported into a plugin part of the capsule that needs to use it, and when it's no longer needed it gets deported from the plugin part so that another capsule can use it.
It's possible (but unusual) to import a capsule instance into more than one plugin part at the same time. The import will succeed as long as none of the ports of the capsule is already bound. That is, a port can only be bound in one "import context" at a time. It's allowed to let some of the ports be unbound in contexts where they will not be used.
Plugin parts by default have multiplicity 0..1.
Example
You can find a sample application that uses a plugin part here.
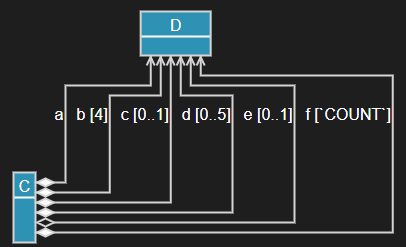
In the example below the capsule C contains a few parts of different kinds and multiplicities. Note that you may declare multiple parts on the same line if they are of the same kind (both c and d below are optional parts).
capsule C {
part a : D;
fixed part b : D[4];
optional part c : D, d : D[0..5];
plugin part e : D;
part f : D[`COUNT`];
// ...
};
Part a is fixed with multiplicity 1 since neither kind nor multiplicity is specified for it. Part b is also fixed (using the fixed keyword for more clarity) and with multiplicity 4. When an instance of capsule C is created 5 instances of capsule D will be automatically created. One of these instances will be inserted into part a and the others into part b. These instances will remain there until the C capsule instance is destroyed.
Part c is optional with multiplicity 0..1. At run-time it can contain at most one instance of capsule D. Part d is also optional but can contain up to 5 instances of D as specified by its multiplicity 0..5.
Part e is plugin with the default multiplicity 0..1. At run-time at most one instance of capsule D can be imported into it. That instance must already have been created in another part, for example part c.
Part f uses a C++ expression for specifying the multiplicity. This can for example be useful if the multiplicity is defined in C++ as a macro or a constexpr.
Parts can be shown in a structure diagram:
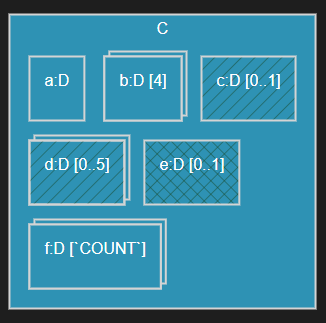
Parts are shown as "stacked" if they have non-single multiplicity (multiplicities specified with a C++ expression are assumed to be non-single). Optional parts are shown with a "diagonal" background pattern, while plugin parts are shown with a "double diagonal" background pattern.
Parts can also be shown in a class diagram:
In the above diagram the filled diamonds show that there is a strong lifetime relationship between a C instance and the instances of D that are located in the fixed and optional parts a, b, c, d and f, while this is not the case for the instance located in the plugin part e as shown by the hollow diamond.
Part with Capsule Factory
If the capsule that types a part has a capsule constructor with custom constructor parameters, you can define a capsule factory for the part. Such a capsule factory consists of one or both of the below code snippets that define how an instance of that capsule should be created and destroyed.
rt::createDefines how to create an instance of the capsule. For example, which constructor arguments to pass, which thread to use for running the created capsule instance, at which index to insert the capsule instance into the part (in case it has multiplicity > 1) etc.rt::destroyDefines how to destroy an instance of the capsule. By default it's destroyed using thedeleteoperator.
Here is an example where a part defines a capsule factory that specifies a create function. The create function gets the mandatory constructor parameters rtg_rts and rtg_ref as arguments, as well as an index argument that specifies the index where the created capsule instance will be inserted.
part engine : Engine [[rt::create]]
`
return new Engine(rtg_rts, rtg_ref, true /* custom constructor arg */);
`;
Note that you may want to create a capsule factory for a part also for other reasons than passing custom constructor parameters. For example, you may want to change the default thread (RTController*) that should execute the created capsule instance, or you may want to instantiate an inherited capsule rather than the capsule that types the part.
Example
You can find a sample application here where a fixed part uses an rt::create code snippet for invoking a custom capsule constructor.
You can use a global capsule factory by means of setting the capsuleFactory TC property. Such a capsule factory will be used when creating or destroying any capsule instance in your application, except those that are located in a part for which you have specified a local capsule factory.
Read more about capsule factories here.
State Machine
State machines are used for specifying the behavior of capsules. It is also possible to provide a state machine for a passive class; see Class with State Machine for more information about that. In this chapter we focus on state machines in capsules.
A state machine consists of states and transitions. During its lifetime a capsule instance transitions between the various states of its state machine, as a consequence of receiving events on its behavior ports. When transitioning between two states one or several code snippets may execute. Such code may for example send events to other capsule instances, something that may cause transitions to execute in their state machines.
A state machine may also have pseudo states, which just like states may be connected with transitions, but that unlike states are not places where the state machine should stay for some time. For example, most pseudo states like junctions and entry/exit points merely act as connection points that make it possible to execute more than one transition when transitioning between two states. The notable exception is the choice in which actually the state machine may get stuck for ever, but that would be an error situation that should not happen in a correctly designed state machine.
State
The states of a state machine are the places where the state machine may stay for some time while waiting for a message to arrive that potentially can cause the state machine to transition to another state. States should have names that describe what is happening while the state machine stays there, or what has happened for the state machine to arrive there. For example, "WaitForInit", "Processing" or "Terminated". By convention state names start with uppercase.
You can declare multiple states on the same line using a comma-separated list of state names. It can be good to write a comment in front of the state name, if you want to elaborate more on its meaning than what is possible in the name itself. Here is an example of a state machine with some states:
capsule TrafficLight {
statemachine {
state WaitUntilServerReady, CycleLight;
state /* pedestrians are crossing the street */ PedestriansCrossing;
initial -> WaitUntilServerReady;
WaitUntilServerReady -> CycleLight;
CycleLight -> PedestriansCrossing;
};
};
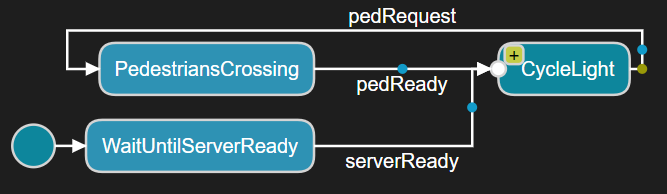
Here is another example where the state machine is shown in a state diagram.
A state comment is not visible in a state diagram, but show up in a tooltip when putting the cursor on a reference to the state. They can thereby make it easier to understand a state machine.
States may be nested to create a hierarchical state machine.
Entry and Exit Action
A state may have an entry and/or exit action which is a code snippet that runs whenever the state is entered and/or exited.
state Walking {
entry
`
server.walk().send();
`;
exit
`
server.stop().send();
`;
};
Example
You can find a sample application where a state has an entry and exit action here.
Transition
A transition connects a source state (or pseudo state) to a target state (or pseudo state). When a capsule instance handles a message that was received on one of its behavior ports, one or several transitions may execute.
It's not required to give a name to a transition, but it's possible and often makes the state machine easier to understand. At least triggered transitions (i.e. transitions where the source is a state) should have a name. A transition name can be choosen to describe what has happened when the transition executes, for example "requestReceived", "timeout" etc. By convention transition names start with lowercase and use camelCase if the name consists of multiple words.
A triggered transition has one or several triggers which define when the transition can be triggered. Each trigger specifies a port and an event. The trigger can only trigger its transition if the received message is an instance of the specified event, and was received on the specified port. In addition it's possible to provide guard conditions that must be fulfilled for the trigger to trigger its transition. Such a guard condition can be specified for the transition, but also for each individual trigger.
Here is an example of a capsule state machine with two triggered transitions requestReceived and timeout. It also contains an initial transition that has no name.
capsule MyCap {
statemachine {
state Waiting, Processing;
initial -> Waiting;
requestReceived: Waiting -> Processing on com1.request, com2.request when
`
return canHandleNow();
`
`
log.log("Handling request");
log.commit();
handle(msg);
`;
timeout: Waiting -> Waiting on timer.timeout[`zCount < 10`];
};
};
![]()
Transition triggers are specified as PORT.EVENT after the keyword on. You may specify multiple triggers separated by comma (,). You can use an asterisk (*) instead of an event to trigger on any event that is received on the port (a so called "receive-any" trigger). Here are some examples of triggers:
t1: S1 -> S2 on port1.event1; // Trigger t1 when receiving event1 on port1
t2: S1 -> S3 on port1.event2, port2.event2; // Trigger t2 when receiving event2 on port1 or event2 on port2
t3: S1 -> S4 on port3.*; // Trigger t3 when receiving any event on port3
It's only valid to specify triggers for transitions that originate from a state. Transitions that originate from a pseudo-state (e.g. a choice or junction) cannot have triggers, i.e. they must be non-triggered transitions. Note, however, that transitions originating from entry and exit points without incoming transitions represent the container state and hence need a trigger.
Transition Code
A transition can have code snippets:
- Effect code, which runs when the transition executes. There can be at most one effect for a transition.
- Guard code, which runs to decide if the transition can execute or not. There can be a guard for the transition itself (specified after the
whenkeyword), but also a guard for each individual trigger (specified in square brackets ([]) after the trigger). The guard for an individual trigger is only evaluated when the received message matches the port and event specified by that trigger, while the guard for the transition itself is always evaluated. A transition can only execute if both these guard conditions are fulfilled.
A guard code snippet can either be written as a C++ statement that returns the boolean guard condition (as in the guard for transition requestReceived in the above example), or it can be written as a boolean expression (as in the trigger guard for the timeout trigger in the above example). If the guard condition is simple, as is often the case, using a boolean expression is recommended. However, if needed you can use any number of C++ statements in a guard condition where the last statement should return a boolean expression. For example, you can declare local variables to store partial results when computing the boolean expression.
Note
Guard code snippets should execute fast and have no side-effects. They are called frequently to decide which transition to execute when a message has arrived.
Both effects and guards are translated to C++ functions in the generated code. These functions have two arguments that can be used in the effect and guard code snippets:
rtdata: A const pointer to the event data carried by the received messagertport: A pointer to the RTProtocol that represents the port on which the message was received
In some cases rtdata will be an untyped pointer (const void*):
- If the transition has multiple triggers, which specify events with data parameters of different types
- If the transition has no triggers, but is part of a compound transition which can be triggered by events with data parameters of different types
- If the transition is an initial transition
- If the transition is triggered by the predefined
Timing::timeoutorExternal::eventevents
In these cases you need to cast rtdata to the correct type. Such casting should normally be avoided, and for cases 1, 2 and 3 above there are ways to do so. For example, instead of one transition with multiple triggers, you can have several transition with one trigger each. And instead of accessing rtdata in a non-triggered transition, it's better to access it in the triggered transition that precedes it.
You can set the const_rtdata property to false on a transition, to make
rtdata a non-const pointer (void*). One reason could be that you want to move the data into a capsule variable, so you can access it later. Moving data can be more efficient than copying it.
[[rt::properties(const_rtdata=false)]] First -> Second on myport.myevent
`
pC = std::move(*rtdata);
`;
Example
You can find a sample application that has transitions with the property const_rtdata unset here.
Initial Transition
Every state machine needs exactly one initial transition. When the state machine starts to run, the first thing that happens is that the initial transition executes and takes the state machine to its first state. Therefore, an initial transition is a non-triggered transition and also cannot have a guard condition. But it can of course have an effect code snippet.
The source of the initial transition is the initial pseudo state which is declared using the initial keyword. Just like for any transition it's optional to give a name to the initial transition (in fact it's often left unnamed).
For capsule instances that are programmatically created (i.e. located in optional capsule parts) you can provide initialization data at the time of creation in the call to incarnate() on a Frame port. The initialization data can be accessed in the effect code of the initial transition. Here is an example:
initial -> WaitForServerInit
`
RTpchar str = *((RTpchar*) rtdata);
`;
Note
Any type of data object can be passed as initialization data which means that rtdata is an untyped pointer that has to be casted to the expected type. A more type-safe way of passing initialization data is to define a constructor for a capsule. A capsule constructor can take any number of arguments, while with rtdata only one data object can be passed (even if you of course can group several data objects into a struct or class to circumvent this limitation). With capsule constructors you can pass initialization data also for capsule instances that are located in fixed parts.
Internal Transition
An internal transition doesn't change the active state and therefore doesn't have a target state. An internal transition is always a triggered transition. You define an internal transition inside the state to which it belongs. Here is an example:
state Done {
unexpected: on myPort.*
`
std::cout << "Unexpected event received! << std::endl;
`;
};
Note the usage of an asterisk (*) to specify that any event received on myPort will trigger the internal transition when the state machine is in the Done state. Such "receive-any" events can of course be used for a trigger of any transition, but can in particular be useful for internal transitions that should handle all messages received on a port that are not handled by other triggered transitions leaving substates of the state. If another event is added to the port's protocol in the future, such a trigger will handle the new event too without a need for being updated.
Example
You can find a sample application that has an internal transition with a "receive-any" event trigger here.
Internal transitions are examples of so called self-transitions. To learn about other types of self-transitions see this chapter.
Choice and Junction
Choices and junctions are pseudo states that make it possible to split transition flows in a state machine. That is, one incoming transition may be split into multiple outgoing transitions. Which of the outgoing transitions that will execute is decided by evaluating their guard conditions.
For a junction the guard conditions are evaluated already before leaving the currently active state. Only if there exists a path of transitions where all guards are fulfilled, will the active state be exited and the transitions can execute. Otherwise the state machine stays in its current state and attempts to find another path of transitions to execute. For a choice the guard conditions are evaluated after leaving the current state, when reaching the choice itself. The outgoing transition which has a fulfilled guard will execute next.
Note
It's important that there always is an outgoing transition for a choice with a fulfilled guard condition. Otherwise the state machine will get stuck in the choice without any chance of getting out of it.
The same is true if a junction is used in the initial transition. If such a junction doesn't have an outgoing transition with a fulfilled guard condition then the state machine will stay in the initial state for ever.
Choices and junctions must have names, so they can be referenced as the source or target of transitions. You can choose to use a name that gives a hint about what conditions that are checked in the guards of the outgoing transitions. For example, isEnabled for a choice that checks a boolean condition and checkValue when the condition has some other type. If you follow this approach you can then name the outgoing transitions accordingly. For example true and false for a choice that checks a boolean condition. By convention choice and junction names start with lowercase and use camelCase if they consist of multiple words. Sometimes it may be difficult to come up with a good name and in that case you can choose something short and "technical" like j1, check1 etc.
Below is an example of a state machine containing a choice and a junction.
statemachine {
state First, Second, Third;
t1: initial -> First;
choice isEnabled;
junction checkThreshold;
switchTurned: First -> isEnabled;
true: isEnabled -> Second when
`
return isEnabled();
`;
false: isEnabled -> Second when
`
else
`;
timeout: First -> checkThreshold;
low: checkThreshold -> Third when
`
return t < LIMIT1;
`;
medium: checkThreshold -> Third when
`
return t >= LIMIT1 && t < LIMIT2;
`;
high: checkThreshold -> Third;
};
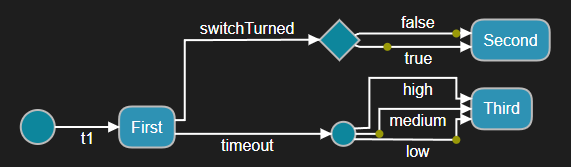
Note the use of the C++ keyword else for defining an else-guard. An else-guard will be fulfilled when no other guard of other outgoing transitions is fulfilled. For choices it's good practise to always have exactly one transition with an else-guard to ensure that at least one guard condition will be fulfilled. Thereby we avoid the risk of the state machine getting stuck in the choice. Else-guards can also be useful for junction transitions, but there they are more optional (except when a junction is used in the initial transition; see the note above).
You can also define an else-transition for a choice or junction by simply omitting the guard condition. This is consistent with triggered transitions where the absense of a guard condition is equivalent to a guard condition that always is fulfilled. See the transition high in the above example.
Guard conditions should be mutually exclusive so that the order in which they are evaluated doesn't matter.
Junctions can also be used for merging multiple incoming transition flows into a single outgoing transition. This can for example be useful if you want to reuse a transition path in the state machine for several triggered transitions.
statemachine {
state S1, S2;
junction j1;
initial -> S1;
t1: S1 -> j1 on port1.e1
`
// handle e1
`;
t2: S1 -> j1 on port2.e2
`
// handle e2
`;
t3: S1 -> j1 on port3.e3
`
// handle e3
`;
common: j1 -> S2
`
// common code here
`;
};
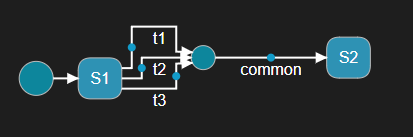
Of course, in the above simple example the same code reuse could also be obtained by putting the common code in a capsule member function which is called by each of the incoming transitions. But if the common transition is followed by more non-triggered transitions the above approach is more feasible.
When multiple triggered transitions converge into a common transition as in the example above, and the events that trigger those transitions have a data parameter, it's best to access that data in the triggered transitions and not in the common transition. This is especially true if the types of those data parameters are not the same, because in that case the rtdata parameter of the function generated for the common transition will be untyped (void*). You can of course still cast it to another type, but that requires that you can know which of the triggered transitions that were triggered. It's therefore better to access the data in the triggered transitions and if necessary store it in a capsule variable which you then can access in the common transition if needed.
Example
You can find a sample application that demonstrates usage of a choice and junction here.
Hierarchical State Machine
A state machine is hierarchical if it contains at least one composite state, i.e. a state with a nested state machine. A transition that is triggered in the enclosing state machine (i.e. the state machine that contains the composite state) should enter a composite state by specifying an entry point of the composite state as the target. In the nested state machine another transition can connect that entry point to a state in the nested state machine. A transition in the nested state machine may specify an exit point of the composite state as the target. In the enclosing state machine another transition can connect that exit point to a state in the enclosing state machine.
Entry and exit points are pseudo states that need to be named. The names can be chosen to give a hint about when the composite state is entered or exited through them, for example systemStarted or errorDetected. If you want you can prefix the names with ep or ex. It's also common to use short and "technical" names like ep1 or ex1 if a more descriptive name doesn't make sense. By convention entry and exit point names start with lowercase and use camelCase if they consist of multiple words.
It's also possible to directly enter a composite state without using an entry point. In this case the behavior will depend on whether the composite state is entered for the first time or not. If it is for the first time, the initial transition of the nested state machine will execute after the transition that targets the composite state has executed. Otherwise the composite state will instead be entered using deep history, i.e. by activating the state in the nested state machine that was most recently active (and recursively if that state again is a composite state).
Note
It's recommended to always enter a composite state using an entry point as the behavior then doesn't depend on if the state was previously entered or not.
Below is an example of a hierarchical state machine with a composite state CompositeState that contains a nested state machine. Note that you can declare multiple entry or exit points on the same line.
statemachine {
initial -> CompositeState.ep1;
state CompositeState {
state Nested;
entrypoint ep1, ep2;
exitpoint ex1;
initial -> Nested;
ep1 -> Nested;
Nested -> ex1;
ep2 -> history*;
};
state Other;
CompositeState.ex1 -> Other;
Other -> CompositeState.ep2;
};
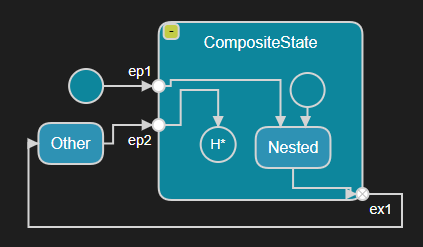
Note that a dot (.) is used as scope resolution operator, to make it possible to reference an entry or exit point from the enclosing state machine. Inside the nested state machine the entry and exit points are directly accessible without use of the scope resolution operator (using it there would be an error).
Example
You can find a sample application that contains a composite state with an entry and exit point here.
Just like a junction, an entry or exit point can have multiple outgoing transitions. Guards on those transitions decide which of them to execute, and are evaluated before leaving the current state. Therefore, the same recommendations as for guard conditions of junctions apply for entry and exit points.
Trigger Matching Rules
When a capsule with a hierarchical state machine receives a message for event E on one of its ports P the below rules decide which transition that will be triggered:
- Starting at the innermost active state, outgoing transitions are traversed. If one of these transitions has a trigger that matches event
Eand portP, and that trigger is enabled, then that transition is triggered. A trigger is enabled if it has a guard condition that evaluates to true (or no guard at all) and its transition also has a guard condition that evaluates to true (or no guard at all). If more than one such outgoing transition exists, any of them can be triggered. In practise it's the first found enabled trigger which will decide which transition to trigger, but you should not make assumptions that the outgoing transitions and its triggers will be traversed in a certain order. It's therefore good practise to write outgoing triggered transitions so that at most one of them will be enabled at the same time. - If no enabled transition was found in the innermost active state, the search repeats at the next enclosing composite state. If that state also did not have an outgoing transition that was enabled then the search proceeds outwards in the state hierarchy until the top-most active state is reached.
- If no enabled transition was found in the outermost active state, then the received message is considered unexpected and will be lost. This is handled as described in Unhandled Messages.
To avoid unhandled messages it's common to have one or many transitions (often internal transitions) on the outermost composite state with "receive-any" triggers (i.e. triggers that use an asterisk (*) for matching any received event on a port). Such transitions can handle errors and other unexpected situations. One situation that is common is that someone adds a new event in one of the protocols that type the service ports of the capsule, but forgets to ensure that the new event is handled by the capsule's state machine. A "receive-any" trigger for that port can "catch" this and avoid that a message for the new event is lost.
Example
You can find a sample application that illustrates the trigger matching rules here.
Entry and Exit Point without Incoming Transition
You can choose to not connect an entry or exit point with an incoming transition. In this case the entry or exit point represents the owning state, and a transition that originates from such an entry or exit point behaves the same as if it would originate from the state itself. Contrary to other transitions that originate from an entry or exit point, such a transition is therefore triggered and should have at least one trigger.
An entry point without incoming transition is useful for handling events in a composite state that should be commonly handled regardless of which substate that is active. The composite state remains active when handling the event, and it will not be exited and entered. The target of such a transition may either be a nested state, the deep history pseudo state, or an exit point (see local transition).
In a similar way an exit point without incoming transition can be used for exiting the composite state in a common way regardless of which substate that is active. The behavior is the same as if the transition would originate from the composite state itself, but by using an exit point you can give a descriptive name to it that tells something about why the state is exited. This can be in particular useful if there are multiple such "exit transitions" from the composite state.
In the example below the transition tx originates from an entry point ep2 without incoming transition. When it triggers the active state will change from Composite::Nested to Composite::Nested2 without leaving the Composite state. The transition done originates from an exit point ex2 without incoming transition. It will exit the active substate of Composite and then exit Composite itself, before activating the Done state.
statemachine {
state Composite {
entrypoint ep1, ep2;
exitpoint ex2;
state Nested, Nested2;
ep1 -> Nested;
tx: ep2 -> Nested2 on port1.timeout;
};
initial -> Composite.ep1;
state Done;
done: Composite.ex2 -> Done on port1.timeout;
};
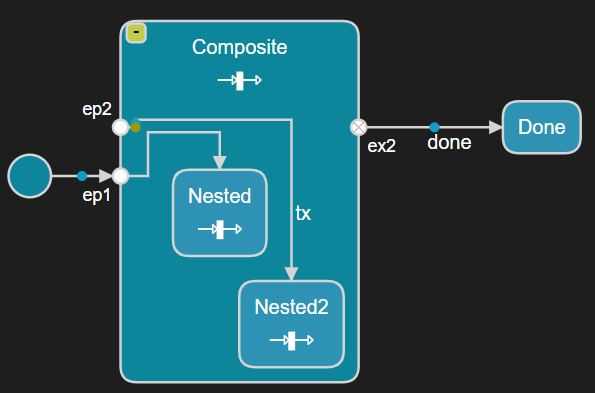
Example
You can find a sample application that uses an entry and exit point without incoming transitions here.
Deep History
Every nested state machine has an implicit pseudo state with the name history* (in state diagrams it's shown as H* to save space). It can be used as a target for any transition inside the nested state machine. When it is reached, the state machine will restore the previously active substate. If that state again is a composite state, its previously active substate will also be restored. This goes on recursively for all nested state machines (which is why it's called a deep history).
In the example above we can see that the transition from ep2 targets the deep history pseudo state. This means that if the Nested substate is active and then the transition to ex1 gets triggered, the state Other becomes active. If then the transition to ep2 gets triggered the CompositeState will be entered using deep history so that the Nested substate will again become active.
Example
You can find a sample application that uses the deep history pseudo state here.
If a state is entered via an entry point that has no outgoing transition in the nested state machine, then it behaves in the same way as if the entry point was connected to the deep history pseudo state. For clarity it's best to avoid this and instead use an explicit reference to deep history if that is the intended behavior. In the same way it's possible to exit a composite state using an exit point that has no outgoing transition in the enclosing state machine. In this case the composite state is not exited and instead the previously active substate again becomes active (recursively, just like for deep history). This is also not recommended, unless the transition is a local transition.
Local Transition
A transition in a nested state machine where the source is an entry point of the container state is a local transition. The target of such a transition is either a substate of the nested state machine, or an exit point on the same container state. In the latter case the transition is a local self-transition. A local self-transition behaves something in between an internal transition and a regular (a.k.a. external) self-transition. An internal transition defined on a composite state handles a message without exiting neither that composite state, nor any of its substates. However, a local self-transition will exit the substates, run the effect code, and then enter the same substates again. But the composite state itself will not be exited and entered. An external self-transition on the other hand will exit both the composite state and all active substates recursively, run the effect code, and then enter these states again.
Both for local and external self-transitions exiting of states happens bottom-up which means that the deepest nested substate will first be exited, then its parent state, and so on. Entering happens in the opposite order, i.e. in a top-down fashion.
Let's look at an example to understand the difference between these three kinds of self-transitions:
statemachine {
initial -> SelfTransitionExample;
state SelfTransitionExample {
state Nested1 {
state Nested2;
};
internal: on port1.e1
`
// Internal transition
`;
entrypoint e1;
exitpoint e2;
local: e1 -> e2 on port1.event2
`
// Local transition
`;
};
external: SelfTransitionExample -> SelfTransitionExample on port1.event3
`
// External transition
`;
};
![]()
Assume the currently active state configuration is {SelfTransitionExample, Nested1, Nested2} when one of the self-transitions get triggered:
- Internal transition (
internal)
No state is exited and the active state configuration remains unchanged.
- Local self-transition (
local)
1) Nested2 is exited.
2) Nested1 is exited.
3) local executes.
4) Nested1 is entered.
5) Nested2 is entered.
- External self-transition (
external)
1) Nested2 is exited.
2) Nested1 is exited.
3) SelfTransitionExample is exited.
4) external executes.
5) SelfTransitionExample is entered.
6) Nested1 is entered.
7) Nested2 is entered.
Example
You can find a sample application that has a local self-transition here.
If the local transition is not a self-transition it must target a substate within the same state machine that contains the local transition. The only difference in behavior for such a local transition, compared to a local self-transition, is that the target state (and its substates, if any) are entered after the effect code of the transition has executed.
Example
You can find a sample application that has a local transition that targets a substate here.
Local transitions are for example useful for implementing error handling in a state machine. Regardless of which substate that is active a local transition can trigger on an error message and handle it in a uniform way. If the error can be recovered from, a local self-transition brings back the state machine to same active state configuration as before the error occurred. If it's not possible to recover from the error, you may instead let the local transition target a substate that represents the error that occurred.
Class with State Machine
Art allows you to create passive classes with state machines. This can be an alternative to using a capsule in case you only need a passive stateful data object, and don't need the ability to send events to it, or to let it execute in its own context. A class with a state machine is more lightweight than a capsule at runtime.
Transitions in a class state machine are triggered by calling trigger operations on the class. A trigger operation is similar to a regular member function in C++, but does not have a code behavior of its own. Instead, when you call a trigger operation on an object of a class with a state machine it may trigger a transition in the class' state machine. That transition may have an effect code snippet that will execute.
A trigger operation can have parameters which allows you to pass data when calling them. Those parameters can be accessed in the transition that is triggered by it.
Below is an example of a class with a state machine with two trigger operations initialize and finalize. Note that you can define multiple trigger operations on the same line.
class DataObject {
/* Trigger Operations */
trigger initialize(`int` data), finalize();
/* State Machine */
statemachine {
state Initial, Initialized, Finalized;
initial -> Initial;
init: Initial -> Initialized on initialize(`int`)
`
// Initialized
int i = data;
`;
Initialized -> Finalized on finalize()
`
// Finalized
`;
};
};

Just like for C++ member functions, trigger operations support overloading. That is, you can have many trigger operations with the same name as long as their full signatures are unique. The signature of a trigger operation consists of its name and the types of all its parameters. When you reference a trigger operation with parameters as a transition trigger, you need to include the types of the parameters (see the trigger for the init transition above).
The same transition can be triggered by multiple trigger operations (just like a transition in a capsule state machine can be triggered by multiple events). However, in that case those trigger operations should agree on the names and types of their parameters so that the transition effect code can access them in a way that works regardless of which of the trigger operations that will trigger the transition.
Names of classes with state machines by convention start with uppercase, while names of trigger operations and their parameters by convention start with lowercase and use camelCase if the name consists of multiple words.
A common design pattern is to let a class-with-statemachine instance be managed by a single capsule instance. This means that the capsule instance is responsible both for creating, using and finally destroying the class-with-statemachine instance. If you follow this pattern it is thread-safe to, for example, call public member functions defined on the capsule from a transition in the class state machine (or, better, to call non-public member functions by letting the class be a friend of the capsule). This can for example be used as a means for the class state machine to send events through the ports of the capsule (i.e. it can call a capsule member function that sends the event). However, to avoid exposing the full capsule functionality to the class state machine it's recommended to define an interface (i.e. abstract C++ class) which the capsule can implement. This interface can contain only those member functions which the class needs to call on the capsule.
A class state machine can use the same constructs as a capsule state machine with a few exceptions:
-
The initial transition cannot access initialization data as can a capsule's initial transition. Instead you can define one or several constructors for the class with parameters needed for passing initialization data when the class-with-statemachine instance is created. See Constructor for more information.
-
If the state machine is hierarchical the deep history pseudo state can be used. But a class with state machine also supports the shallow history pseudo state, which capsule state machines do not support.
-
Even if it's possible for a class with a state machine to inherit from another class with a state machine, this doesn't mean that the state machines will be inherited as is the case for capsule inheritance. Read more about this in Inheritance.
A class with state machine can have the same code snippets as a capsule.
Example
You can find a sample application that uses a class with a state machine here.
Constructor
By default the initial transition of a class state machine will not execute at the time of constructing the class-with-statemachine instance. If you want this to happen, you need to create a constructor with a call to the operation rtg_init1() which contains the code from the initial transition. If you want to wait with "starting" the state machine you can instead call rtg_init1() at a later point in time, for example from a regular member function of the class.
You can define any constructors you need on a class with a state machine. They are regular C++ constructors and allow to pass initialization data when creating a class-with-statemachine instance. Remember to call the rtg_init1() function in all such constructors, if you want the state machine to start at the time of creating the class-with-statemachine instance.
Here is an example of a class with a state machine that has a user-defined constructor:
class PC {
[[rt::decl]]
`
private:
double m_data;
public:
PC(double data);
`
[[rt::impl]]
`
PC::PC(double data) : m_data(data) {
rtg_init1();
}
`
statemachine {
state First;
initial -> First
`
// State machine started
`;
};
};
Shallow History
Every nested state machine has an implicit pseudo state with the name history (in state diagrams it's shown as H to save space). It can be used as a target for any transition inside the nested state machine. When it is reached, the state machine will restore the previously active substate. However, if that state again is a composite state it's previously active substate will not be restored. This is in contrast to the deep history pseudo state, and is why it's referred to as a shallow history.
Here is an example:
class MyClass {
trigger op();
trigger op2();
statemachine {
_i1: initial -> S2.ep;
state S2 {
entrypoint ep, ep2;
state Inner1, Inner2;
t1: ep -> Inner1;
t2: Inner1 -> Inner2 on op();
t3: ep2 -> history on op2();
};
};
};
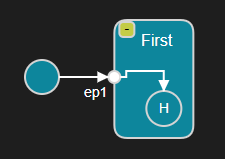
When transition t3 is triggered, the state machine will return to either the Inner1 or Inner2 substate, whichever was active previously.
Example
You can find a sample application with a passive class state machine that uses shallow history here. A passive class state machine sample using deep history instead is here.
Inheritance
By using inheritance you can reuse and customize generic (base) Art elements into more specific (derived) Art elements. An Art element can inherit either from one or several other Art elements, and/or it can inherit from one or several C++ classes. The derived Art element can redefine elements of the base element. The redefining element (located in the derived element) can change one or several properties of the redefined element (located in the base element). This is very similar to how inheritance works in C++, with the difference that in C++ a redefining element has more restrictions on what properties that can be changed in the redefined element. For example, a redefining member function (known as an overridden member function in C++ terminology) must keep the same signature as the redefined member function (known as a virtual base member function in C++ terminology), and can only (in fact, must) change its implementation.
In some cases Art inheritance not only allows to redefine inherited elements, but also to completely exclude them. An excluded element is not present in the derived element, so exclusion can be seen as a special form of redefinition where the whole element is removed in the derived element. In C++ it's not possible to exclude any inherited members.
Capsule Inheritance
A capsule can inherit from another capsule. Only one base capsule is allowed; multiple inheritance is not supported for capsules. In addition a capsule can inherit from any number of C++ classes (or structs).
The derived capsule is type compatible with the base capsule in the sense that if you have a capsule part typed by the base capsule, you can at runtime incarnate it with instances of the derived capsule.
Capsule inheritance has multiple dimensions. One dimension is the usual C++ inheritance between classes (remember that a capsule is an active class). In this dimension it is for example possible to redefine (a.k.a override) a virtual member function defined in the base capsule or in another base C++ class. But there is also a second dimension where the state machine of the derived capsule will implicitly inherit from the state machine of the base capsule. This makes it possible to redefine transitions and states. For example, a redefining transition in a derived capsule can change the effect code, the guard condition or the target state or pseudo state. And a redefining state in a derived capsule can change the entry or exit action, as well as any substate or subtransition in case the state is composite and has a nested state machine. It's also possible to completely exclude a state or a transition, either in the capsule's top state machine, or in a nested state machine.
Below is an example of a capsule D that inherits from another capsule B. In addition the capsule D inherits from two C++ classes IDataManager and IController.
capsule B {
[[rt::decl]]
`
protected:
virtual void doSmth();
`
[[rt::impl]]
`
void B::doSmth() {
// ...
}
`
statemachine {
state BS, BS2;
_Initial: initial -> BS;
};
};
capsule D : B, `IDataManager`, `IController` {
[[rt::decl]]
`
// IDataManager impl
protected:
void manageData() override;
// IController impl
void control() override;
void doSmth() override;
`
[[rt::impl]]
`
// impl of manageData() and control()
void D::doSmth() {
// ...
SUPER::doSmth(); // Call inherited function
}
`
statemachine {
state DS;
state exclude BS2;
redefine _Initial: initial -> DS;
};
};
In the example we can see that D overrides functions from the base C++ classes that are assumed to be virtual (or pure virtual). For brevity the implementations of these functions have been omitted but would be placed in the rt::impl code snippet. D also overrides a virtual function doSmth() from the base capsule B. The implementation of that function (also placed in the rt::impl code snippet) calls the inherited function by using a macro SUPER. This macro expands to the name of the base capsule class. Using this macro, instead of the base capsule class name, makes it easier to copy/paste code from one capsule to another.
Example
You can find a sample application where a capsule inherits from both another capsule and from C++ classes here.
We can also see an example of a state machine redefinition. The initial transition _Initial of B's state machine is redefined in D's state machine so that it targets state DS instead of state BS. In the state diagram of D the state BS and the initial pseudo state are drawn with gray color and dashed outline, to show that they are inherited. The transition _Initial is also drawn with dashed outline, but with a different line style ("dash-dot-dot"), to show that it's redefining the inherited initial transition. The state BS2 is excluded in D's state machine. In state diagrams excluded elements are shown with a "crossed" background or line-style.
Note that to be able to redefine the initial transition of B it is necessary to give it a name (so that it can be referenced as redefined from D). This is yet another reason why it's good practise to give names to transitions, even if it's not mandated. But, of course, if you want to prevent anyone from creating a derived capsule with a state machine that redefines a certain transition, you can accomplish that by not giving a name to that transition. In effect, an unnamed transition is final, i.e. cannot be overridden or excluded.
Note
If the source and/or target state of a transition is excluded in an inherited capsule state machine, then that transition is implicitly excluded too. It's not necessary to exclude such a transition explicitly using the exclude keyword, even if it's of course allowed to do so.
Note
Only states and transitions can be explicitly excluded in an inherited capsule state machine. If you want to exclude pseudo states such as choices and junctions you can accomplish that implicitly by excluding all their incoming and outgoing transitions.
The rule that a capsule state machine must have exactly one initial transition also applies to a derived capsule. Therefore, when you introduce inheritance between two existing capsules, you typically first get an error saying that the derived capsule has two initial transitions (one inherited, and one locally defined). You then need to decide if you want to either remove the initial transition in the derived capsule, or (like in the above example) instead redefine the initial transition.
Example
You can find sample applications where capsule state machines are inherited here:
Capsule inheritance also has a third dimension, which relates to its structure. Parts and ports defined in the base capsule are inherited by the derived capsule. Just like for states and transitions, it's possible to redefine or exclude a part or a port. A redefining port can change the type (i.e. protocol), multiplicity and the notification property of the redefined port. A redefining part can change the type, multiplicity and kind (fixed, optional or plugin) of the redefined part.
Below is an example of a capsule DPPI that inherits from another capsule BPPI. The port port1 and the part part1 is redefined, while the port port2 and part part2 are excluded.
capsule BPPI {
service port port1 : PR1;
behavior port port2 : PR1;
part part1 : Cap1;
part part2 : Cap1;
statemachine {
state State;
initial -> State;
};
};
capsule DPPI : BPPI {
service notify port redefine port1 : PR2[10];
optional part redefine part1 : Cap2[0..20];
part exclude part2;
behavior port exclude port2;
statemachine {
state State2;
};
};
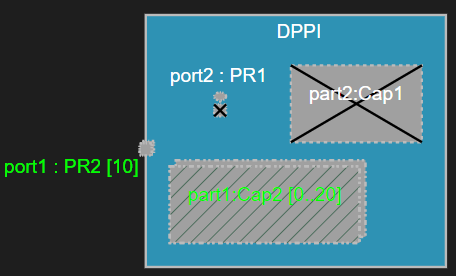
Redefined and excluded elements are also shown in class diagrams. Below is the class diagram for the capsules in the above example.
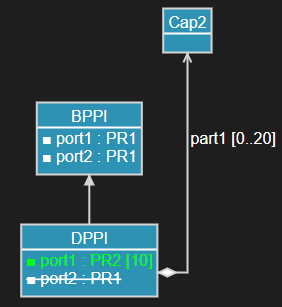
Example
You can find a sample application where parts are inherited here.
Calling Code from an Inherited Transition
Guard and effect code for a transition that redefines an inherited transition can call the guard and effect code snippet from that inherited transition. For this purpose two C++ macros are available:
- CALLSUPER Calls the inherited code snippet with the same
rtdataandrtportarguments. - SUPERMETHOD Calls the inherited code snippet with custom values for
rtdataandrtport.
That is, CALLSUPER is equivalent to SUPERMETHOD(rtdata, rtport).
Example
You can find a sample application where these macros are used here.
Note that these macros are just a convenience and you can accomplish the same thing if you place the code of the transition code snippet in a virtual capsule member function, which then can be overridden in the sub capsule.
Abstract Capsule
Some capsules are not intended to be instantiated, and just provide a base implementation which other capsules can reuse and specialize by means of inheritance. Such capsules should be declared as abstract. By doing so, you can leave the state machine of the abstract capsule incomplete, with only a partial implementation. Validation rules that check the correctness of capsule state machines will not report any problems for state machines of abstract capsules.
Below is an example of an abstract capsule Base which provides a partial implementation of a state machine. The capsule C inherits from Base and extends the inherited state machine to make it complete.
abstract capsule Base {
statemachine {
state State;
initial -> State;
choice x; // Would normally report error ART_0006, but not for abstract capsule
};
};
capsule C : Base {
statemachine {
state A, B;
x -> A when `expr()`;
x -> B when `else`;
};
};
The Base capsule state machine has a choice x without any outgoing transitions. Normally a problem would be reported for that (ART_0006), but because Base is an abstract capsule, no error is reported. The capsule C, which is non-abstract, can inherit Base but must then define the missing outgoing transitions.
Note
A capsule that contains one or many pure virtual functions (either locally defined or inherited) is effectively also abstract in the sense that it cannot be instantiated. However, to use a partial state machine in a capsule you need to declare it with the abstract keyword. Of course, you can still declare pure virtual functions for an abstract capsule if needed.
Example
You can find a sample application with an abstract capsule here. An example with an abstract capsule that has a pure virtual function can be found here.
Class Inheritance
A class with state machine can inherit from other classes with state machines, or from C++ classes (or structs). Multiple inheritance is supported.
Contrary to capsule inheritance, class inheritance does not imply inheritance between the state machines in the derived and base classes. This means it's not possible to redefine or exclude states and transitions in an inherited class state machine. Nor is it possible to redefine trigger operations. In fact, the derived class will have two state machines (its own, plus the one inherited from the base class) and these two state machines will execute independently of each other. That is, class inheritance is more a way of aggregating state machines rather than reusing and redefining them. Because of this, it's rather unusual to let two classes with state machines inherit each other. It's more useful to let a class with state machine inherit from other C++ classes.
Below is an example of a class with state machine that inherits from two C++ classes DataContainer<CData> and IDisposable.
class DataClass : `DataContainer<CData>`, `IDisposable` {
[[rt::decl]]
`
void dispose() override; // From IDisposable
`
[[rt::impl]]
`
void DataClass:dispose() {
// impl
}
`
statemachine {
state State;
initial -> State;
};
};
Abstract Class
Just like for abstract capsules, you can declare a class with the abstract keyword. However, since class state machines are not inherited, there is no formal meaning in doing so. It can still sometimes be useful to declare a class as abstract, to tell users of the class that it should not be directly instantiated. For example, if a class has a pure virtual function it is effectively abstract, and you can then use the abstract keyword to further emphasize this.
abstract class AClass {
[[rt::decl]]
`
virtual void implementMe() = 0;
`
statemachine {
state State;
initial -> State;
};
};
Protocol Inheritance
A protocol may inherit events from another protocol. Only one base protocol is allowed; multiple inheritance is not supported for protocols. Inherited events can be redefined, but not excluded. A redefining event in a derived protocol can change the type of the event parameter as defined in the base protocol.
In the example below, the protocol ExtendedMachineEvents adds one more in-event stop to the inherited MachineEvents protocol. It also redefines the startDeferred event to change its parameter type.
protocol MachineEvents {
in start();
in startDeferred(`unsigned long` /* milliseconds */);
out success();
out error(`std::string` /* error message */);
};
protocol ExtendedMachineEvents : MachineEvents {
in stop();
in redefine startDeferred(`unsigned long long`);
};
Example
You can find sample applications using protocol inheritance here:
Template
A template is a type that is parameterized by means of template parameters to make it more generic. When a template is used (a.k.a. instantiated), actual template parameters must be provided that match the formal template parameters defined in the template. Currently only classes can have template parameters. Just like in C++, two kinds of template parameters are supported:
- Type template parameter
Replaced with a type when the template is instantiated.
- Non-type template parameters
Replaced with a non-type, for example a constant value, when the template is instantiated.
Template parameters may have defaults that will be used if a matching actual template parameter is not provided when instantiating the template.
Below is an example of a class with template parameters, some of which have defaults specified. The keywords typename and class can both be used for defining a type template parameter. A non-type template parameter is defined by specifying its type as a C++ code snippet.
template <typename T = `int`, class U, `int` p1 = `5`>
class TemplateClass : `Base<T,U,p1>` {
[[rt::decl]]
`
void func(T arg1) {
// impl
}
`
statemachine {
state State;
initial -> State;
};
};
Template parameters can only be used from C++ code snippets, and above you see some examples of how they can be used. It's not possible to instantiate a template in Art itself. For example, even if class Base above was defined as an Art class, a C++ code snippet has to be used since it has template parameters.
Example
You can find a sample application using templates here.
Property
Properties are name-value pairs that provide a generic mechanism for augmenting Art elements with extra data. Such data can be utilized by tools that operate on a parsed Art file, such as the code generator and semantic checker. Most Art elements can have properties and the syntax for specifying properties is the same regardless of the kind of element. However, different kinds of Art elements can have different properties.
For Art elements that have a name, properties are specified right after the name. For elements without name, properties are specified before the element itself. In both cases the syntax looks like this:
[[rt::properties(
<property name>=<property value>,
<property name>=<property value>,
...
<property name>=<property value>
)]]
All properties have a default value, so you only need to specify a property if you want to set it to something else. The default values have been chosen so that you in most cases don't need to specify any properties at all.
A property has a type, and its value must conform to that type. The following property types are supported:
- Boolean
Boolean properties have a value that is either true or false. If you want to set a boolean property to true you can use a shorthand syntax where you just specify the property name. For example:
capsule CapProp
[[rt::properties(
generate_file_impl=false,
generate_file_header
)]]
{
// ...
};
Writing generate_file_header is equivalent to writing generate_file_header=true. However, this particular property has the default value true and hence doesn't need to be set at all.
- Integer
Integer properties have a numeric value (>= 0). Here is an example:
protocol XProtocol [[rt::properties(
version=1
)]]{
// ...
};
- String
String properties have a string value, enclosed in double quotes. Here is an example:
class MC [[rt::properties(
rule_config="E0022"
)]]{
// ...
};
- Enumeration
A property of enumeration type has a value that references a literal of the enumeration. There are different enumerations used for different properties. The best way to learn about what enumeration literals that are available for a certain property is to use the Content Assist feature in the Art file editor. Place the cursor after the equal sign, and press Ctrl+Space. Here is an example of defining a property of enumeration type:
publish service unwired behavior port p~
[[rt::properties(
registration=automatic_locked
)]]
: PROT;
Note that in some cases the name of an enumeration literal starts with underscore (_) to prevent it from clashing with the set of Art keywords.
Below is a table that lists all properties that can be used on different kinds of Art elements. Each property is described in a section of its own below the table.
| Property | Art Elements | Type | Default |
|---|---|---|---|
| color | Transition, State, Choice, Junction, Entry Point, Exit Point, Port, Part, Capsule, Class | String | "" |
| const_rtdata | Initial transition, Triggered transition | Boolean | true |
| generate_file_header | Capsule, Class | Boolean | true |
| generate_file_impl | Capsule, Class | Boolean | true |
| generate_descriptor | Class | Enumeration (true, false, manual) | false |
| generate_statemachine | Class | Boolean | true |
| kind | Class | Enumeration (_class, struct) | _class |
| registration | Port | Enumeration (automatic, automatic_locked, application) | automatic |
| registration_name | Port | String | "" |
| rule_config | Capsule, Protocol, Port, Initial transition, Triggered transition Trigger | String | "" |
| version | Protocol | Integer | 0 |
color
Specifies which color to use for an Art element in a diagram. Colors should be specified as RGB values using 6 hexadecimal digits. For example, "#ff00ff". The Art text editor will help you set an appropriate color by means of a color picker.
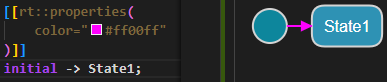
Note that you can also set the color directly from the diagram. Select a symbol or line and then set the color property using the Properties view (under "Appearance").
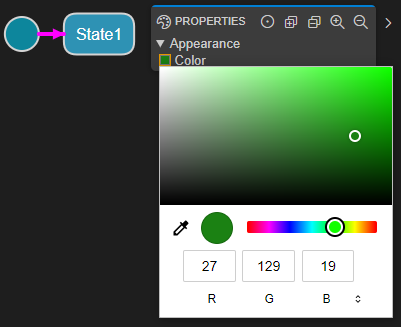
const_rtdata
This property can be set on transitions where you need to modify the data it receives when it's triggered. If the property is set to false the rtdata parameter in the transition function will be non-const. It can then be modified, which for example can avoid copying received message data and instead move it using its move constructor or move assignment operator.
[[rt::properties(const_rtdata=false)]] CurrentState -> NextState
`
someAttr = std::move(*rtdata); // Avoid copying the message data object
`;
MyTransition: [[rt::properties(const_rtdata=false)]] OtherState -> NextState
`
pC = std::move(*((MyClass*) rtdata)); // Avoid copying the message data object
`;
Note that the const_rtdata property appears in the Art syntax right after the transition name. If the transition has no name, it appears in the beginning of the transition declaration.
generate_file_header
By default a capsule or class with state machine is translated to one header file (.h) and one implementation file (.cpp). Set this property to false to prevent generation of the header file, for example if you prefer to write it manually.
generate_file_impl
By default a capsule or class with state machine is translated to one header file (.h) and one implementation file (.cpp). Set this property to false to prevent generation of the implementation file, for example if you prefer to write it manually.
generate_descriptor
If you want a class with state machine to have a type descriptor you need to set this property. Set it to true to give it an automatically generated type descriptor. Set it to manual to instead use a manually implemented type descriptor.
generate_statemachine
This property can be set to false to prevent code generation for a class state machine. You may for example want to do this if you prefer to implement the state machine manually but still have a state diagram that serves as documentation for it. A class state machine with this property set to false is considered informal, and will not be validated (i.e it does not need to be semantically correct).
kind
This property can be set to struct to translate a class with state machine to a struct instead of a class.
registration
This property specifies how to register an unwired port at runtime. The default is automatic which means the port will be registered automatically when the container capsule instance is initialized. The value automatic_locked has the same meaning but the registration will be "locked" so that any future attempt to deregister it, or register it under a different name, will fail. Set the property to application to programmatically register the port using the functions registerSPP() and registerSAP() respectively.
registration_name
This property specifies the name to use when registering an unwired port at runtime. By default the port name is used, but it can be overridden using this property.
rule_config
This property is used for configuring validation rules for an Art element. Read more about this here.
version
Specifies the version of an Art element. You can use this to keep track of updates to types used in APIs (increase the version when the element changes).